
Page 126 - 75252_安防20年5月刊_150dpi
P. 126
I 智能交通
Intelligent Traffic
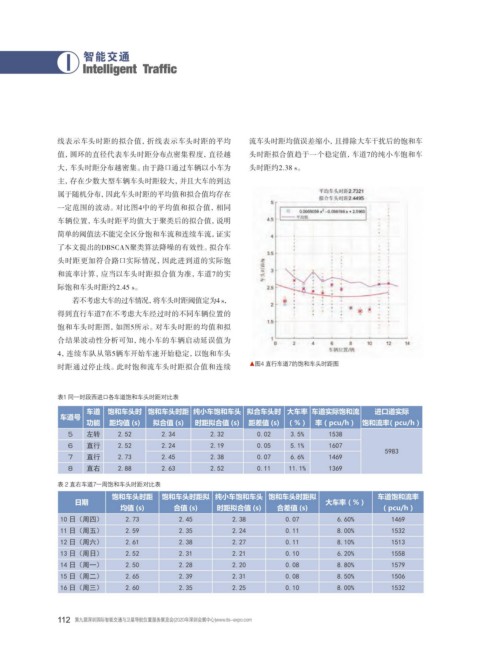
线表示车头时距的拟合值,折线表示车头时距的平均 流车头时距均值误差缩小,且排除大车干扰后的饱和车
值,圆环的直径代表车头时距分布点密集程度,直径越 头时距拟合值趋于一个稳定值,车道7的纯小车饱和车
大,车头时距分布越密集。由于路口通过车辆以小车为 头时距约2.38 s。
主,存在少数大型车辆车头时距较大,并且大车的到达
属于随机分布,因此车头时距的平均值和拟合值均存在
一定范围的波动。对比图4中的平均值和拟合值,相同
车辆位置,车头时距平均值大于聚类后的拟合值,说明
简单的阈值法不能完全区分饱和车流和连续车流,证实
了本文提出的DBSCAN聚类算法降噪的有效性。拟合车
头时距更加符合路口实际情况,因此进到道的实际饱
和流率计算,应当以车头时距拟合值为准,车道7的实
际饱和车头时距约2.45 s。
若不考虑大车的过车情况,将车头时距阈值定为4 s,
得到直行车道7在不考虑大车经过时的不同车辆位置的
饱和车头时距图,如图5所示。对车头时距的均值和拟
合结果波动性分析可知,纯小车的车辆启动延误值为
4,连续车队从第5辆车开始车速开始稳定,以饱和车头
时距通过停止线。此时饱和流车头时距拟合值和连续 ▲图4 直行车道7的饱和车头时距图
表1 同一时段西进口各车道饱和车头时距对比表
车道 饱和车头时 饱和车头时距 纯小车饱和车头 拟合车头时 大车率 车道实际饱和流 进口道实际
车道号
功能 距均值 (s) 拟合值 (s) 时距拟合值 (s) 距差值 (s) (%) 率(pcu/h) 饱和流率(pcu/h)
5 左转 2.52 2.34 2.32 0.02 3.5% 1538
6 直行 2.52 2.24 2.19 0.05 5.1% 1607
5983
7 直行 2.73 2.45 2.38 0.07 6.6% 1469
8 直右 2.88 2.63 2.52 0.11 11.1% 1369
表 2 直右车道7一周饱和车头时距对比表
饱和车头时距 饱和车头时距拟 纯小车饱和车头 饱和车头时距拟 车道饱和流率
日期 大车率(%)
均值 (s) 合值 (s) 时距拟合值 (s) 合差值 (s) (pcu/h)
10 日(周四) 2.73 2.45 2.38 0.07 6.60% 1469
11 日(周五) 2.59 2.35 2.24 0.11 8.00% 1532
12 日(周六) 2.61 2.38 2.27 0.11 8.10% 1513
13 日(周日) 2.52 2.31 2.21 0.10 6.20% 1558
14 日(周一) 2.50 2.28 2.20 0.08 8.80% 1579
15 日(周二) 2.65 2.39 2.31 0.08 8.50% 1506
16 日(周三) 2.60 2.35 2.25 0.10 8.00% 1532
112 第九届深圳国际智能交通与卫星导航位置服务展览会(2020年深圳会展中心)www.its-expo.com
ᇆିࢌ๙ JOEE ྒ௹