
Page 127 - 75252_安防20年5月刊_150dpi
P. 127
根据路口原绿信比方案和饱和流率直接取平均值计
算方法得到车道7降噪前通行能力为596 pcu/h,但根
据实际过车计算的通行能力为657 pcu/h,通行能力
提升9.28%,极大地提高计算结果精度,减少车辆延
误和路口资源浪费,提高信号配时效果。
根据HCM模型计算饱和流率,理想条件下饱和
流率为1900 pcu/h,宽度修正系数为0.98,大车修正系
数为0.95,纵坡修正系数为0.95,其他修正系数为1,
得到直行车道的饱和流率为1680 pcu/h。根据HCM计
算方法得到车道7的理论通行能力为722 pcu/h,与实
际通行能力相比,通行能力误差为9.0%,说明还有其
它影响因素需要考虑,修正系数也有待进一步确认。
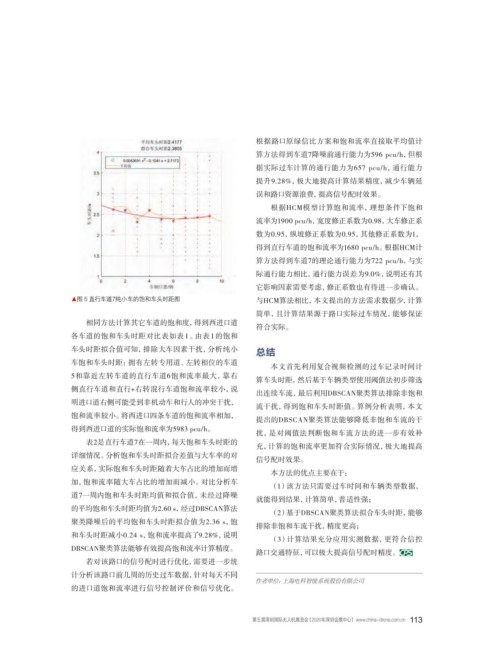
▲图 5 直行车道7纯小车的饱和车头时距图 与HCM算法相比,本文提出的方法需求数据少,计算
简单,且计算结果源于路口实际过车情况,能够保证
相同方法计算其它车道的饱和度,得到西进口道
符合实际。
各车道的饱和车头时距对比表如表1。由表1的饱和
车头时距拟合值可知,排除大车因素干扰,分析纯小 总结
车饱和车头时距:拥有左转专用道、左转相位的车道
本文首先利用复合视频检测的过车记录时间计
5和靠近左转车道的直行车道6饱和流率最大,靠右
算车头时距,然后基于车辆类型使用阈值法初步筛选
侧直行车道和直行+右转混行车道饱和流率较小,说
出连续车流,最后利用DBSCAN聚类算法排除非饱和
明进口道右侧可能受到非机动车和行人的冲突干扰,
流干扰,得到饱和车头时距值。算例分析表明,本文
饱和流率较小。将西进口四条车道的饱和流率相加,
提出的DBSCAN聚类算法能够降低非饱和车流的干
得到西进口道的实际饱和流率为5983 pcu/h。
扰,是对阈值法判断饱和车流方法的进一步有效补
表2是直行车道7在一周内,每天饱和车头时距的
充,计算的饱和流率更加符合实际情况,极大地提高
详细情况。分析饱和车头时距拟合差值与大车率的对
信号配时效果。
应关系,实际饱和车头时距随着大车占比的增加而增
本方法的优点主要在于:
加,饱和流率随大车占比的增加而减小。对比分析车
(1)该方法只需要过车时间和车辆类型数据,
道7一周内饱和车头时距均值和拟合值,未经过降噪
就能得到结果,计算简单,普适性强;
的平均饱和车头时距均值为2.60 s,经过DBSCAN算法
(2)基于DBSCAN聚类算法拟合车头时距,能够
聚类降噪后的平均饱和车头时距拟合值为2.36 s,饱
排除非饱和车流干扰,精度更高;
和车头时距减小0.24 s,饱和流率提高了9.28%,说明
(3)计算结果充分应用实测数据,更符合信控
DBSCAN聚类算法能够有效提高饱和流率计算精度。
路口交通特征,可以极大提高信号配时精度。
若对该路口的信号配时进行优化,需要进一步统
计分析该路口前几周的历史过车数据,针对每天不同
作者单位:上海电科智能系统股份有限公司
的进口道饱和流率进行信号控制评价和信号优化。
第五届深圳国际无人机展览会(2020年深圳会展中心) www.china-drone.com.cn 113
ᇆିࢌ๙ JOEE ྒ௹