
Page 113 - 安防19年12月刊_150dpi
P. 113
步完善车路协同系统建设。针对无人驾驶实际应用,
最终将在有人/无人混行的道路状况下行驶,通过车
路协同系统建设,满足“人-车-路” 一体化综合监控
和管理,实现更深入的感知、更泛在的互联、更智慧
的处理。
基于WIFI的通信场景可视化(V2P);
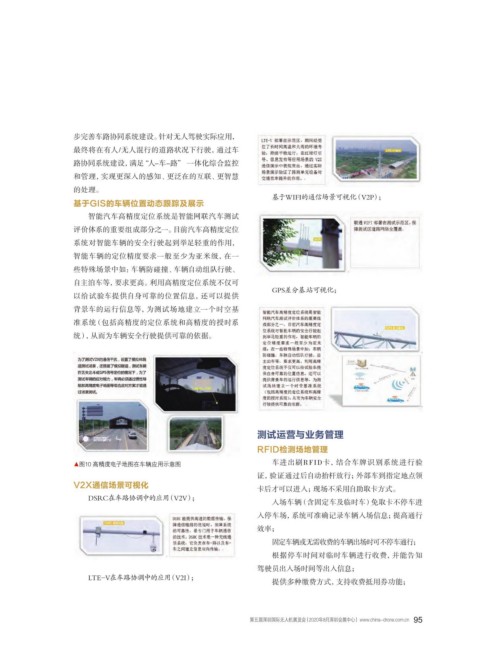
基于GIS的车辆位置动态跟踪及展示
智能汽车高精度定位系统是智能网联汽车测试
评价体系的重要组成部分之一。目前汽车高精度定位
系统对智能车辆的安全行驶起到举足轻重的作用,
智能车辆的定位精度要求一般至少为亚米级,在一
些特殊场景中如:车辆防碰撞、车辆自动组队行驶、
自主泊车等,要求更高。利用高精度定位系统不仅可
GPS差分基站可视化;
以给试验车提供自身可靠的位置信息,还可以提供
背景车的运行信息等,为测试场地建立一个时空基
准系统(包括高精度的定位系统和高精度的授时系
统),从而为车辆安全行驶提供可靠的依据。
测试运营与业务管理
RFID检测场地管理
▲图10 高精度电子地图在车辆应用示意图 车进出刷RFID卡,结合车牌识别系统进行验
证,验证通过后自动抬杆放行;外部车到指定地点领
V2X通信场景可视化
卡后才可以进入;现场不采用自助取卡方式。
DSRC在车路协调中的应用(V2V);
入场车辆(含固定车及临时车)免取卡不停车进
入停车场,系统可准确记录车辆入场信息;提高通行
效率;
固定车辆或无需收费的车辆出场时可不停车通行;
根据停车时间对临时车辆进行收费,并能告知
驾驶员出入场时间等出入信息;
LTE-V在车路协调中的应用(V2I);
提供多种缴费方式,支持收费抵用券功能;
第五届深圳国际无人机展览会(2020年8月深圳会展中心) www.china-drone.com.cn 95
ᇆିࢌ๙ JOEE ྒ௹ඹ