
Page 117 - 安防19年7月刊_150dpi
P. 117
2)数据诊断及实施方案 指标发现路段北侧指标均较高,表示车辆行驶过
S 市主干 路 路段,3 块 板,双向 4 快 2 慢,南 侧 程中受出入口车辆干扰较为严重,主要集中在⑨ 开
④⑤⑥⑦ 机 非分 隔带 开口,用地性 质办 公;北侧 口处,提出以下路段优化方案(图3-3):由于⑤⑩开
⑧⑨⑩ 机非分隔带开口,用地性质居住,见图3-1。 口在路段中游且互为对称,结合行人过街,允许车辆
折减后计算得到路段北侧通行能力1456pcu/h,路段 左转;开口⑥左转车流对于主路干扰不大,允许左转;
南侧1238pcu/h;视频检测器采集到周一早高峰路段 开口④⑦⑧ 左转车流对于主路干扰较大,右进右
北段小时流量1159pcu/h,南侧686pcu/h,算出路段北 出;开口⑨与⑧合并;同时完善公交标线,增设违停
侧服务水平D,南侧服务水平B,指标显示尚可,但车均 抓拍。
延误时间仍较长。
▲图3-3 路段改善方案
▲图3-1 城市主干路CAD模型绘制 动态干线协调控制技术与治理实践
1)数据来源与计算方法
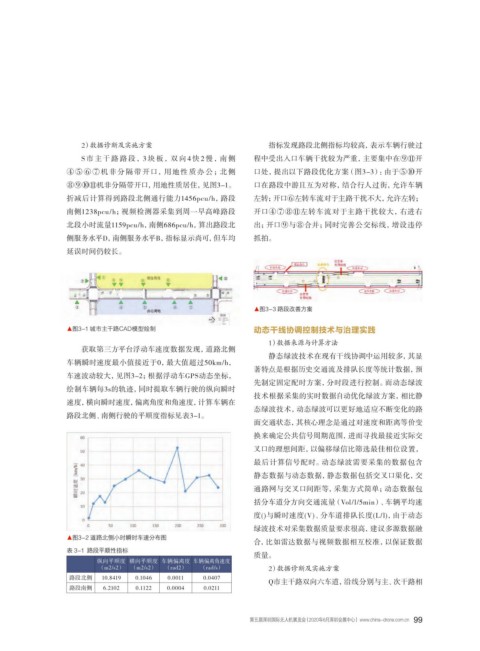
获取第三方平台浮动车速度数据发现,道路北侧
静态绿波技术在现有干线协调中运用较多,其显
车辆瞬时速度最小值接近于0,最大值超过50km/h,
著特点是根据历史交通流及排队长度等统计数据,预
车速波动较大,见图3-2;根据浮动车GPS动态坐标,
先制定固定配时方案,分时段进行控制。而动态绿波
绘制车辆每3s的轨迹,同时提取车辆行驶的纵向瞬时
技术根据采集的实时数据自动优化绿波方案,相比静
速度,横向瞬时速度,偏离角度和角速度,计算车辆在
态绿波技术,动态绿波可以更好地适应不断变化的路
路段北侧、南侧行驶的平顺度指标见表3-1。
面交通状态,其核心理念是通过对速度和距离等价变
换来确定公共信号周期范围,进而寻找最接近实际交
叉口的理想间距,以偏移绿信比筛选最佳相位设置,
最后计算信号配时。动态绿波需要采集的数据包含
静态数据与动态数据,静态数据包括交叉口渠化,交
通路网与交叉口间距等,采集方式简单;动态数据包
括分车道分方向交通流量(Vol/l/5min)、车辆平均速
度()与瞬时速度(V)、分车道排队长度(L/l),由于动态
绿波技术对采集数据质量要求很高,建议多源数据融
▲图3-2 道路北侧小时瞬时车速分布图
合,比如雷达数据与视频数据相互校准,以保证数据
表 3-1 路段平顺性指标
质量。
纵向平顺度 横向平顺度 车辆偏离度 车辆偏离角速度
(m2/s2) (m2/s2) (rad2) (rad/s) 2)数据诊断及实施方案
路段北侧 10.8419 0.1046 0.0011 0.0407
Q市主干路双向六车道,沿线分别与主、次干路相
路段南侧 6.2102 0.1122 0.0004 0.0211
第五届深圳国际无人机展览会(2020年6月深圳会展中心) www.china-drone.com.cn 99
ᇆିࢌ๙ JOEE ྒ௹ؽ