
Page 129 - 安防19年11月刊_150dpi
P. 129
基于高精地图的
车路协同智能交通系统
□ 文/陆哲元
谈及 “车路协同”,恐怕除了专业人士,绝大多数 息缺失、交通控制过于死板、运营车辆管理问题、道路
人未必听说过这个名词。实际上,“车路协同”是近年 养护管理问题、紧急救援不够及时。
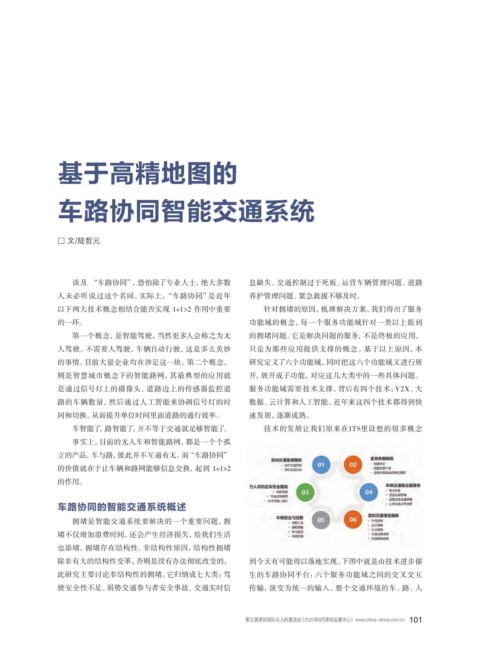
以下两大技术概念相结合能否实现 1+1>2 作用中重要 针对拥堵的原因,梳理解决方案,我们得出了服务
的一环。 功能域的概念,每一个服务功能域针对一类以上提到
第一个概念,是智能驾驶,当然更多人会称之为无 的拥堵问题。它是解决问题的服务,不是终极的应用,
人驾驶。不需要人驾驶,车辆自动行驶,这是多么美妙 只是为那些应用提供支撑的概念。基于以上原因,本
的事情。目前大量企业均在涉足这一块。第二个概念, 研究定义了六个功能域,同时把这六个功能域又进行展
则是智慧城市概念下的智能路网,其最典型的应用就 开,展开成子功能,对应这几大类中的一些具体问题。
是通过信号灯上的摄像头、道路边上的传感器监控道 服务功能域需要技术支撑,背后有四个技术:V2X、大
路的车辆数量,然后通过人工智能来协调信号灯的时 数据、云计算和人工智能。近年来这四个技术都得到快
间和切换,从而提升单位时间里面道路的通行效率。 速发展,逐渐成熟。
车智能了,路智能了,并不等于交通就足够智能了。 技术的发展让我们原来在ITS里设想的很多概念
事实上,目前的无人车和智能路网,都是一个个孤
立的产品,车与路,彼此并不互通有无。而“车路协同”
的价值就在于让车辆和路网能够信息交换,起到 1+1>2
的作用。
车路协同的智能交通系统概述
拥堵是智能交通系统要解决的一个重要问题,拥
堵不仅增加浪费时间,还会产生经济损失,给我们生活
也添堵。拥堵存在结构性、非结构性原因,结构性拥堵
除非有大的结构性变革,否则是没有办法彻底改变的, 到今天有可能得以落地实现。下图中就是由技术进步催
此研究主要讨论非结构性的拥堵。它归纳成七大类:驾 生的车路协同平台:六个服务功能域之间的交叉交互
驶安全性不足、弱势交通参与者安全事故、交通实时信 传输,演变为统一的输入。整个交通环境的车、路、人
第五届深圳国际无人机展览会(2020年8月深圳会展中心) www.china-drone.com.cn 101
ᇆିࢌ๙ JOEE ྒ௹